DOIT ESP32 개발보드 (BLE + WiFi Development Board) 로 SG90 마이크로 서보모터를 사용해서
웹으로 서보모터를 제어해 보는 프로젝트 입니다
*V2 버전은 FireBeetle_ESP32 세팅으로 사용합니다 V2 버전은 포스팅 하단으로 내려서 확인 후 세팅한 다음 테스트 합니다*
먼저 DOIT ESP32 개발보드 (BLE + WiFi Development Board) 의 초기 세팅법과 사용방법에 대해서 알아보고 간단하게
Blink 테스트를 해보겠습니다
WiFi 와 BLE 2가지 기능을 지원하는 ESP32 기반의 IoT 개발보드 입니다
CP210x 드라이버를 사용하며 한개의 프로세서가 통신을 할때 다른 한개의 프로세서가 I/O 제어를 담당하는
듀얼프로세스 마이크로프로세서를 장착하여 ESP8266의 치명적인 단점을 개선하였습니다
아두이노 통합 개발환경 Arduino IDE 를 지원하며, 아두이노를 이용하여 IoT 프로젝트를 진행하기에 적합합니다
ESP32 라이브러리는 계속해서 업데이트 되고 있기 때문에 ESP32 포럼은 주기적으로 확인하는 것이 좋습니다
Espressif
ESP 32 Forum WebPage

<DOIT ESP32 개발보드 이미지>


<DOIT ESP32 개발보드 상세 사양>
사용된 부품
DOIT ESP32 개발보드
미니 브래드 보드 - 2개
점퍼케이블
막대저항 220 Ohm
5mm LED 블루
초기세팅 방법
DOIT ESP32 개발보드 (BLE + WiFi Development Board) 는 CP210x UART DRIVER 를 사용하기 때문에
일단 장치인식을 위해서 드라이버를 설치해 줍니다
https://www.silabs.com/products/development-tools/software/usb-to-uart-bridge-vcp-drivers
위 링크에서 자신의 OS에 맞는 드라이버를 다운로드 받아서 설치해 줍니다
드라이버 설치가 끝나고 보드를 마이크로 USB케이블로 연결하면 PC의 장치관리자에 CP210x 로 COM포트가 확인됩니다

기본적으로 아두이노 통합 개발환경 아두이노 IDE 를 설치해야 합니다 (Arduino.cc 의 IDE 를 설치합니다
Arduino.org 의 IDE 와는 호환 되지 않습니다)
https://www.arduino.cc/en/Main/Software
github 에서 esp32 라이브러리와 툴을 다운 받습니다
https://github.com/espressif/arduino-esp32
arduino-esp32-master.zip 파일을 압축 해제한 다음 폴더명을 편의상 esp32 로 변경해 줍니다
C:\Program Files (x86)\Arduino\hardware 이 경로에 hardware 폴더안에 espressif 폴더를 새로 만들어 줍니다
C:\Program Files (x86)\Arduino\hardware\espressif 이렇게 경로가 되고 espressif 폴더안에 esp32 폴더를 넣어주면 됩니다
그리고 마지막으로 C:\Program Files (x86)\Arduino\hardware\espressif\esp32\tools 경로의
tools 폴더안에 get.exe 를 관리자 권한으로 실행시켜 주면 됩니다

위와 같은 창이 뜨는데 모든 설치가 정상적으로 끝나면 창이 자동으로 닫히니 정상적으로 설치가 종료 될 때까지 기다립니다
윈도우 10은 경로가 틀릴수 있는데 윈도우10 은 C:\Users\Administrator\Documents\Arduino\hardware 경로로 설치하면 됩니다
Arduino IDE 를 실행한 다음 툴 메뉴를 확인해 보면 아래처럼 ESP32 패밀리가 추가된 것을 확인할 수 있습니다

ESP32 Dev Module 로 보드를 선택하고 포트를 잡아준 후 업로드 스피드를 115200 으로 변경해 줍니다
ESP32 라이브러리의 대부분의 통신속도가 115200으로 세팅되어 있기 때문에 115200으로 변경해 주는게 좋습니다
ESP32 툴과 라이브러리가 정상적으로 설치가 되었습니다
다만 github 에서 다운로드 한 arduino-esp32-master.zip 압축파일을 풀어보면 알수 있겠지만
libraries 폴더안의 AzureIoT 와 BLE 폴더가 비어있습니다
때문에 IDE에서 잘못된 라이브러리가 있다는 메세지가 계속 나옵니다 (이 두 폴더를 삭제해 주면 해결됩니다)
*아두이노 IDE 최신 버전을 설치하였거나 위 과정이 번거롭다면*
아래 이미지 처럼 아두이노 IDE 도구 메뉴에서 보드 매니저를 클릭후 ESP32로 검색후
esp32 by Espressif Systems 를 설치해 주면 됩니다
버전은 2.0.9 버전으로 설치 하고 테스트 후 출고 하고 있기 때문에 2.0.9 버전을 권장합니다

DOIT ESP32 개발보드 (BLE + WiFi Development Board) 의 동작 유무도 확인해 볼 겸 Blink 테스트를 해보겠습니다
아래 배선도를 참조해서 배선합니다
구성배선도

사용된 예제파일
예제파일을 확인해 보면 알 수 있듯이
int LED_BUILTIN = 2;
2번핀에 LED를 연결해야 하는것을 알수 있습니다
스케치를 복사해서 컴파일 및 업로드를 해줍니다
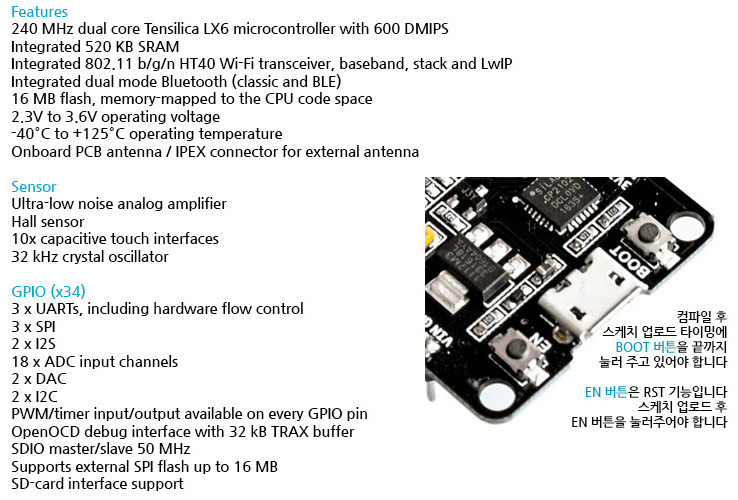
DOIT ESP32 개발보드 (BLE + WiFi Development Board) 는 EN 과 BOOT 두개의 버튼이 장착되어 있습니다
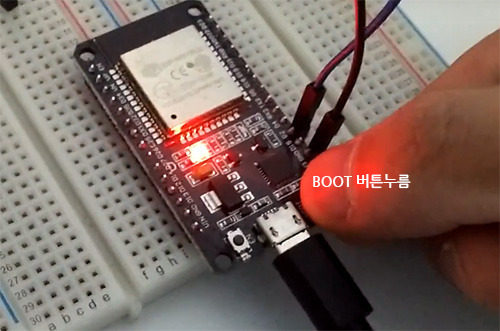
컴파일에서 업로드로 넘어가는 순간에 타이밍을 맞춰서 오른쪽의 BOOT 버튼을 눌러줍니다
BOOT 버튼은 업로드 타이밍에 맞춰서 누르고 업로드가 완료될 때까지 계속 누르고 있으면 됩니다

업로드가 완료되면 왼쪽의 EN 버튼을 눌러줍니다
EN버튼은 RST 리셋 기능을 합니다
프로젝트 동영상
DOIT ESP32 개발보드 (BLE + WiFi Development Board) 의 이상유무도 확인했고 이어서
SG90 마이크로 서보모터를 사용해서 PC 의 웹으로 서보모터를 제어해 보는 프로젝트를 진행해 보겠습니다
사용된 부품
SG90 마이크로 서보모터
DOIT ESP32 개발보드
미니 브래드 보드 - 2개
점퍼케이블
구성배선도

사용된 라이브러리
![]() ESP32_Arduino_Servo_Library.zip
ESP32_Arduino_Servo_Library.zip
라이브러리 추가 방법은 Arduino IDE 설치하기 포스팅을 참조해 주세요
사용된 예제코드
주의사항
ESP32 기본 라이브러리 외에 ESP32_Arduino_Servo_Library 라이브러리가 필요합니다
위 첨부파일을 다운로드 해서 압축해제 후 설치해도 되고 아래 링크에서 다운로드 해서 설치해도 됩니다
https://github.com/RoboticsBrno/ESP32-Arduino-Servo-Library
위 첨부된 예제코드를 확인해 보면
#include <WiFi.h>
#include <Servo.h>
두가지 라이브러리를 사용합니다
아두이노 IDE 를 설치하면 기본적으로 설치되는 servo.h 라이브러리가 있는데
기본 servo.h 라이브러리 로는 컴파일 에러가 납니다 ESP32 Servo 라이브러리를 꼭 설치해 주어야 합니다
const char* ssid = "REPLACE_WITH_YOUR_SSID";
const char* password = "REPLACE_WITH_YOUR_PASSWORD";이 부분 자신의 WiFi 아이디와 비밀번호로 수정해 줍니다
// GPIO the servo is attached to
static const int servoPin = 13;서보핀은 GPIO13 (D13) 핀에 배선합니다
void setup() {
Serial.begin(115200);
시리얼 통신 속도는 역시 115200 입니다
정상적으로 스케치 컴파일 업로드가 완료되면 아두이노 IDE의 시리얼 모니터를 실행 후 EN 버튼을 눌러 줍니다

시리얼 모니터를 통해 연결된 WiFi URL 192.168.0.X 를 확인할수 있습니다
물론 이때 당연히 시리얼 모니터의 통신속도는 115200 이어야 합니다
인터넷 웹 브라우저를 연 다음 주소창에 URL
192.168.0.X
를 입력해 줍니다

위 이미지 처럼 슬라이드 바를 움직여서 서보모터를 회전 시킬수 있습니다
왼쪽부터 오른쪽으로 0~180도 입니다
아두이노 IDE 의 시리얼 모니터로 모니터링을 할 수 있습니다 이 때 Client disconnected 메세지가 나오면 연결이 끊긴 것 입니다
아두이노 IDE 1.8.5 버전 기준으로 라이브러리의 문제인지 호환성의 문제인지 몇번 제어를 하면
WiFi 통신 연결이 끊기는 현상이 있습니다 (ESP32 모듈의 리셋 버튼을 눌러주고 웹 브라우저를 종료했다 재실행하면 다시 연결 됩니다)
또한 PC의 웹으로는 서보모터 제어가 잘 되지만 스마트폰 브라우저로는 제어가 안되는 현상도 역시 발생했습니다
추후에 라이브러리가 추가로 업데이트 되는 것을 확인해 봐야 할 것 같습니다
프로젝트 동영상
*V2버전 FireBeetle_ESP32 세팅*
https://wiki.dfrobot.com/FireBeetle_ESP32_IOT_Microcontroller(V3.0)__Supports_Wi-Fi_&_Bluetooth__SKU__DFR0478
기본적으로 CP210X 드라이버가 설치되어 있어야 합니다
포스팅 상단 초기세팅 방법을 참조해서 드라이버를 설치해 줍니다

드라이버가 정상적으로 설치되면 위 이미지와 같이 장치관리자에 COM포트가 인식됩니다
아두이노 IDE를 실행후 상단메뉴 파일--->환경설정 순으로 클릭합니다

설정에서 추가적인 보드 매니저 URLs 에 아래 링크를 추가해 주고 확인을 눌러 줍니다
http://download.dfrobot.top/FireBeetle/package_esp32_index.json
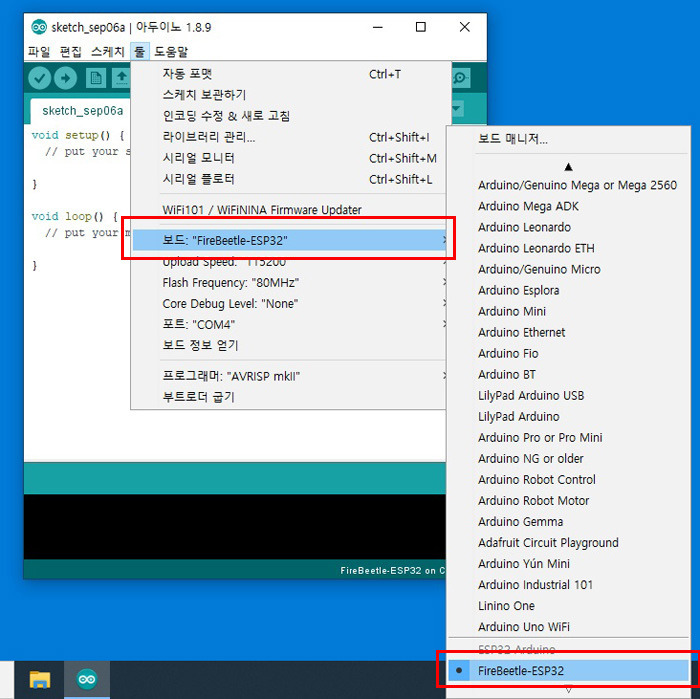
툴--->보드--->보드 매니저 순으로 클릭합니다

보드 매니저 실행후 상단메뉴 타입에서 Contributed 나 All 로 설정해서 FireBeetle_ESP32 패키지를 검색합니다

FireBeetle-ESP32 Mainboard by DFRobot DFRDuino 패키지를 인스톨 해 줍니다
(이미 설치한 후 이므로 제거 메뉴가 떠 있습니다, 설치 이전 이라면 설치 메뉴가 뜹니다)
패키지 설치가 끝나면 툴 메뉴에서 FireBeetle_ESP32 보드가 검색되고 아두이노 IDE에 ESP32 라이브러리와 예제가 추가 됩니다
툴 세팅은 위와 같이 사용하면 되며, 업로드 스피드는 업로드 에러가 나지 않는지 확인하며 조정해서 사용합니다 (권장 115200 입니다)
세팅이 끝났으므로 간단하게 Blink 예제를 테스트 해 봅시다
사용된 예제파일
포스팅 상단의 DOIT ESP32 보드의 Blink 예제와 약간 틀리지만 배선은 동일 합니다
브래드 보드의 LED를 깜박이고 싶다면 포스팅 상단 DOIT ESP32 보드와 동일하게 D2 핀에 배선 하면 됩니다
프로젝트 동영상-ESP-32S 보드 FireBeetle_ESP32 세팅 Blink 테스트
FireBeetle-ESP32 웹으로 SG90 서보모터 제어 테스트
FireBeetle-ESP32 웹으로 SG90 서보모터 제어 테스트는 포스팅 상단의 DOIT ESP32 보드와 다른 라이브러리와 예제를 사용합니다
물론 보드 세팅도 FireBeetle-ESP32 로 되어 있어야 합니다 (DOIT ESP32 보드로 세팅하면 업로드가 되지 않습니다)
사용된 예제파일
![]() FireBeetle ESP32 Web Servo.txt
FireBeetle ESP32 Web Servo.txt
위 첨부 된 예제코드를 다운로드해서 예제코드를 살펴보면
#include <WiFi.h>
#include <esp32-hal-ledc.h>
라이브러리를 사용합니다
위 두가지 라이브러리는 FireBeetle-ESP32 라이브러리를 설치하면 기본 설치되어 있는 라이브러리 입니다
const char* wifi_name = "Your Wifi Name"; // Your Wifi network name here
const char* wifi_pass = "Your Wifi Password"; // Your Wifi network password here
이부분 자신의 와이파이 이름과 비밀번호로 수정해 줍니다
void setup()
{
Serial.begin(115200);
ledcSetup(1, 50, 16); // channel 1, 50 Hz, 16-bit width
ledcAttachPin(15, 1); // GPIO 15 assigned to channel 1
ledcWrite(1, servo_pos); // Moved the servo to 90 degree
서보모터 시그널 핀은 D15번 핀 세팅 입니다

SG90 서보모터는 FireBeetle-ESP32 보드에 5V, GND, D15 로 배선하면 됩니다
(VCC 는 3.3V 말고 꼭 5V 로 배선해야 합니다 모터라서 전압과, 전류를 많이 타는 편 입니다 3.3V는 전압이 부족합니다)
하단 동영상에도 보면 알수 있듯이 Right 버튼과 Light 버튼을 누르면
모터가 버튼과 반대 방향으로 회전 하는것을 알수 있습니다
이 부분 수정하고 싶다면
client.print("<a href=\"/?moveleft\"\"><button>Left</button></a>");
client.print("<a href=\"/?moveright\"\"><button>Right</button></a>");
예제에서 위 <button>Left<button> 와 <button>Right<button>를 서로 변경해 주면 됩니다
예제 확인 후 예제를 업로드 해 줍니다
(IDE 하단에 ESP32 아키텍쳐에서 실행되는 현재보드에서는 호환되지 않을 수 있습니다 라는 메세지가 뜨는데 무시하면 됩니다)
시리얼 모니터 실행 후 WiFi 와 연결 된 IP 주소를 확인 합니다,
웹 주소창에 IP 주소를 입력하면 ESP32 Servo Control 메뉴가 나옵니다
Right 와 Left 버튼을 눌러서 서보모터를 회전 시킬수 있습니다

프로젝트 동영상-FireBeetle_ESP32 세팅 웹으로 SG90 서보모터 제어
FireBeetle_ESP32 보드의 서보모터 구동 라이브러리와 예제는 DOIT ESP32 보드의 예제에 비해
통신도 안 끊기고 비교적 수월하게 동작하는 것 같습니다




댓글